RoboTuna
This video shows an example of how a previous iteration of the RoboTuna worked.
The requirements for this project included having water-proof fins, soft actuation to have light-weight fins, and enough compliance to be able to
push water to propel itself.
I worked on fabricating a robotic fish that will be able to ultimately collect wildlife data with minimal disturbance to the ecosystem.
To do so, I tested custom-built solenoids, created fins, and developed silicone bladders for aquatic actuation using 3D printing, casting, and molding techniques.
Silicone bladders could be used to release and add air to move the fish up and down, while the fins can be used for horizontal motion.
My report for designing and fabricating fins and bladders is linked here.
I was also awarded a Claire Booth Luce Research Award to continue my research over the summer.
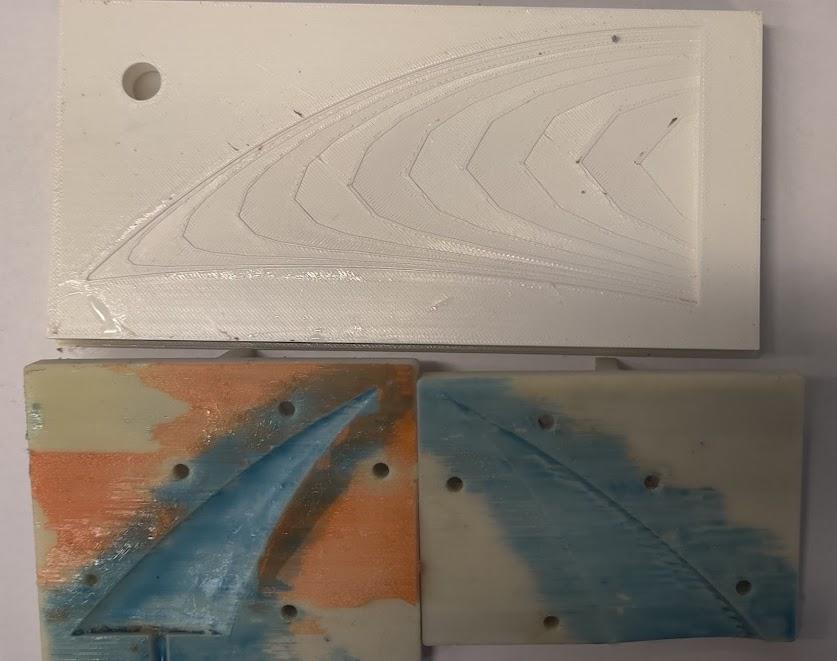 3D prints of 2-part fin molds of various shapes and sizes.
3D prints of 2-part fin molds of various shapes and sizes.
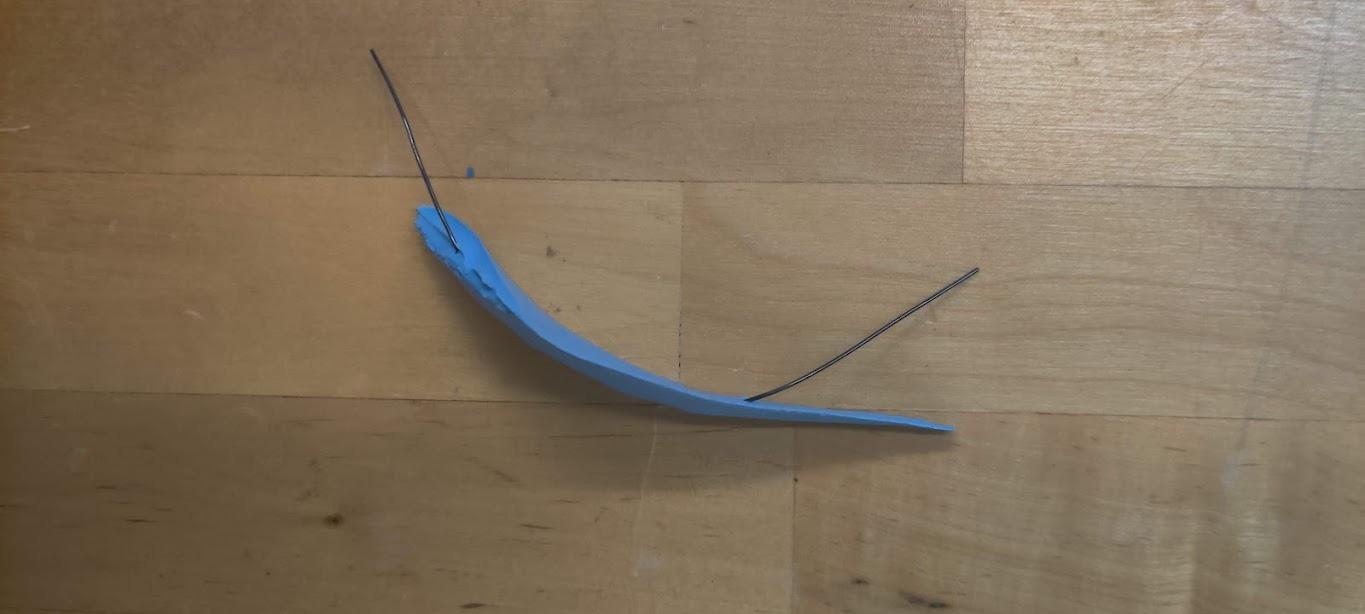 Casted silicon fin with two nitinol wires running through to bend the fin in either direction.
Casted silicon fin with two nitinol wires running through to bend the fin in either direction.
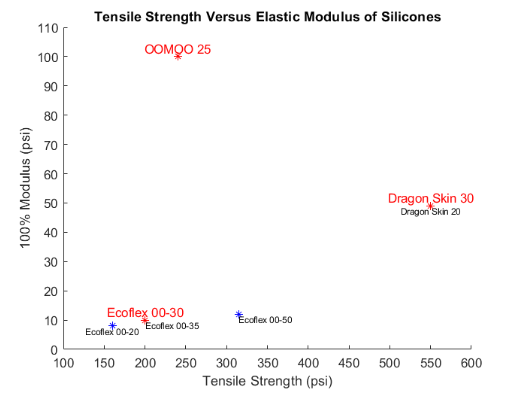 Graph showing the elastic modulus versus the tensile strength of various silicones I tested.
Graph showing the elastic modulus versus the tensile strength of various silicones I tested.